虫の生態に学ぶ"マイクロマシン"
講師 川俣 栄一氏
会員 工学博士
28年理工卒
平成15年10月5日
東久留米市中央公民館
1 まえがき
私達人間は、虫に対して一般に好奇心を持つが、好感を持つことは少ない。これは、虫は私達の身近にいて、人を刺したり咬んだりするほか、食物や繊維などに思わぬいたずらをするからであろう。また、虫の複雑かつ異常な形態や構造を大写しにすると、私達に強烈な嫌悪感を抱かせるのに十分である。しかし、これまでに登録済みの虫(約100万種)のうち、害虫とみなされているものは3%以下に過ぎず、益虫のほうがはるかに多い。このことや異常な形態にも増して、遥かに驚嘆に値するものは虫がなしうる驚くべき行動である。虫のさまざまな生き方は驚異と歓喜の源泉ともなっているばかりでなく、それはまた科学技術開発上の豊富なアイデアの宝庫ともなっている。本稿ではまず、虫のめぼしい行動について簡単に触れた後、特に蚊の吸血システムおよびサルモネラ菌のべん毛の行動をとりあげ、これらが最近脚光を浴びている“マイクロマシン”(超微小機械)と、どのようなかかわりを持っているかについて述べる。ついで、この“マイクルマシン”を医療用の立場から観察し、特に患者の負担を軽減することを目的とした低侵襲“マイクロマシン”は、現在どの程度まで開発されているか、今後これらの研究はどのような方向に発展しようとしているか、さらにこれらの研究が進めば人間社会にどのような貢献が期待されるかなどの概要について、話を分かり易く進めることにする。
2 虫の行動は小説より奇なり
(1) 虫のめぼしい行動
前述のように、登録済みの虫は約100万種であるが、最近の報告によれば、熱帯雨林生息の未発表の虫を考慮すると、約3000万種にも及ぶ可能性があると言われている。その生息地は地球上のあらゆる場所と言ってよく、アマゾンの熱帯雨林をはじめ、ヒマラヤの雪原から荒海の海底に至る。ある種のハエの幼虫は温泉の熱湯に耐え、そこに繁茂する耐熱性の藻草を食べて生きている。一方、氷点下の中で長時間生きている種もいる。また、米国海底探検隊の報告によれば、ニュ−ジ−ランド東方の海底2000メ−トル付近から噴出する温度約90度の硫化水素中を泳ぐバクテリアが、今も古代の名残を秘めて現存しているとか。このように虫の並々ならぬ多様性と逞しい適応性は他にその類例をみない。以下、虫のめぼしい行動について最小限ふれておく。
a 虫は特異な形態を持つ
虫の体は頭部、胸部、腹部からなり多くの節を持つ。骨格は外側にあって人とは内外が裏返しになっている。表面は固い殻に覆われて伸縮性がないから、成長にともなって脱皮が必要となる。神経索は身体の下部に広がり、肺はなく体壁にある小さい孔(気門)を通じて呼吸する。気門に入った空気は無数の細かい気管を通って直接各部の細胞に分配される。このため心臓や血液は酸素を各細胞に送り込むのにあまり重要ではない。頭部にある触角や腹部か前肢にある器官で、物音を聞き匂いを嗅ぎ味を味わう。骨格が外側にあることから、化石時代の例外を除くと、虫のサイズは比較的小さく制限される。
b 虫は音・光・香りで環境情報を察知する
虫は音・光・香りで相互のコミュニケーションや獲物探索および自己防衛などを行う。多くのガはコウモリの超音波を検出して逃げ、コウモリはキリギリスの鳴き声を聞きこれを襲う。トンボの複眼は30,000個以上の個眼からなり、各個眼は独立して働きモザイク像を作る。レンズの焦点を合わせる手段はないから近眼(人間の視力の約1/100か1/1000)で、映像を鮮明に捉えるというより、外敵の素早い動きを捉えるのに適応している。ミツバチは4000個ほど、ガや蝶の仲間では1万から2万の個眼からなる複眼をもつが、多くの虫の複眼は赤色に敏感で青色に鈍感である。モンシロチョウの複眼ではオスは黒くメスは白く見えるらしく、オス・メスの区別がし易いとか。多くの虫は複眼のほか別に単眼を数個もち、複眼の視力の増大と体の平衡感覚の役目を果たす。ホタルは腹部の先端に色素物質と酵素物質を蓄えて、酸素と酵素物質が結合する時、体内エネルギ−の触媒作用により色素物質が閃光を放つ。幻想的に空を飛ぶオスは、閃光の強弱・継続時間・閃光間隔の長短など、それぞれ異なる信号を放ちメスを探す。草葉のメスはお気に入りのオスの信号と同じ閃光応答をして、オスの飛来を受け入れる。ある種のメスは他の種のオスの閃光応答を真似して、やって来るオスを食べるものもいるとか。まさに魔女ならぬ魔性のメスか!
c 虫の世界は匂いの世界と言ってよく、触覚・圧力・振動にも敏感
臭覚と味覚が高度に発達している。多くの虫のオスはメスが放つ低濃度のフェロモンの香りを、発生源から数マイルの地点からでも探知できるという。あの小柄な蚊は半径約10メートル以内の獲物の匂いを察知する。また、殆どの虫は触覚・圧力・振動などの刺激に敏感である。例えば、旧世界(ヨ−ロッパ・アジア・アフリカ)に住むマラヤ族の蚊は、ある種のアリを触角でさすり、胃の中にあるものを吐き出させて食糧を得ている。約4億年の歴史をもつゴキブリは、尾端に突き出た毛で敏感に逃避反応を触発する。その反応時間は約10ミリ秒で、人のまばたき約100ミリ秒の1/10とか。
d 虫はまた驚くべき身体的能力を持っている平均的な虫の引く力は自分の体重の約50倍と言われている。人は体重の0.83倍、馬は0.5〜0.85倍の荷重を引く。また、甲虫の持ち上げる力は体重の約800倍。これは人が60トンを持ち上げる力に匹敵する。ノミは距離33センチを跳び、高さ20センチにも及ぶ。これは人が水平距離30メ−トルを跳び、高さ30階のビルを越えることに値する。また、バッタはレジリンという完全弾性タンパク質を脚に持つ優れた跳躍虫である。その貯蔵エネルギ−の効率は97パ−セントとか。若しレジリンで作ったボ−ルを100メ−トルの高さから落とすと、97メ−トル弾むことになる。コメツキ科の甲虫は仰向けにおかれると脚で元に戻れない。胸部を後方に曲げその反作用で回転しながら跳び上がり、腹部を下に着地するまで何回でも懸命に繰り返す。このように胸部は力の源泉ともなっている。人は異なる筋肉を792種しか持たないが、虫の筋肉は約4000種にも及ぶとか。このような虫の異常な能力は、これらの複雑な筋肉組織や外骨格の筋肉を巧みに使用し、梃子の原理を駆使しているものと考えられている。
e 虫は翅を持つ只一つの無脊椎動物である飛翔能力は4億年にわたる虫の素晴らしい成功の一つである。体長10ミリメートルのホホアカグロバエは1000回/秒のはばたきをし、その飛翔速度は時速110キロメ−トルにも達する。これは約300体長/秒にも及ぶ。人は約5身長/秒で走り、馬は6馬身/秒、チ−タは約18体長/秒、ハヤブサは約175機長/秒であることを考えると、信じられないほど速いトンボは素早くかつ正確に方向を定め、空中に止まったり横に行ったり後ろに下がったりする能力を持つ最高の空中曲芸師である。オオカバマダラは大規模な渡り鳥ならぬ渡り蝶である。秋には越冬のため、カナダ南部や米国北部からフロリダやメキシコまで飛ぶ。その距離なんと約3000キロメ−トルにも及ぶ。越冬地で交尾したメスは、春にはまた幼虫期に必要な餌を求めて北を目指す。
f 虫は擬態をする名人である
かれらは小枝、葉、刺、鳥の糞のような周囲の物体にみせかける。多くの虫は葉の正確な色合いや葉脈の傷、カビの染みまでも完璧に真似て葉に似せる。かれらがそれらしい向きにとまり、そよ風になびく様は本物そっくり。マレ−シアのあるカマキリは花に良く真似て、花に魅せられて近寄る虫を食べる。虫はまたお互いに真似しあう。擬態は眼に見えるものが多いが、匂いや音、行動まで真似するものもいる。美味しい虫は味の悪い種、毒液を分泌する種、または好ましくない種に見せかけて、捕食動物から身を守る。この種の擬態はチョウ類ではごく一般的である。
g 昆虫の繁殖力は恐ろしいほど大きい
このことについては千差万別で枚挙に遑がない。ミバエに関する遺伝学者の報告の一部についてのみ述べる。理想的な条件下では、ミバエは一年間で25世代をも繁殖するという。メスは一生に約100個の卵を産むが、約半数はオス。初代のオスとメスの2匹から第2世代では100匹生まれ、そのうちのメス50匹がまた100匹を産むから第3世代では5000匹、第4世代では25万匹生まれることになる。繰り返し生まれ増えた第25世代目のミバエ全数を、1インチ立方の升に千匹ずつ入れて重ねるとすると、その体積はおよそ地球から太陽に及ぶ球になるという。この驚異の害虫を駆除するのは至難の業である。
(2) 蚊の吸血システム
蚊は人を刺したり病原体の媒介をしたりすることがあるので、誰しも蚊に対しては嫌なイメ−ジが強い。しかし、蚊の生態は大変高度な機能で支えられている事が次第に明らかになってきた。 蚊は全世界に3300種あまりいるといわれているが、日本での蚊の90%はアカイエカまたはヒトスジシマカ(俗:ヤブカ)である。蚊は人をも吸血対象にすることから害虫の汚名が高いが、必ずしもすべての蚊が人を襲うわけではない。人を刺すのはメスだけで、オスは植物や果物の汁を吸って慎ましく生きている。
さて、吸血する蚊はどのようにして獲物を探すのであろうか。 前述のように虫は、臭覚と味覚がきわめて高度に発達していて、生活上非常に重要な役割を果たしている。蚊の視力は人間のそれに比して数百分の1にもみたないが、臭覚検知に有効と考えられている鋭敏な二酸化炭素センサ−を持っていて、呼吸によって二酸化酸素を排出する人間を含む動物を探知する。同時に乳酸センサ−で汗を感知し、かつ赤外線センサ−で暗闇でも吸血対象としての獲物を探し出す。 探し出した獲物の皮膚にたどり着いた蚊が吸血行為をするには、皮膚の上から皮膚下の血管を探し、皮膚および探し当てた血管に正確に口針を刺し込む必要がある。そこで皮膚上の蚊は先ず、皮膚下の毛細血管の位置を探し求めるため、脚の裏に装着されている微小な超音波センサ−を用いて聴診する。さしあたって聴診器ともいうべきこの微小な超音波センサ−の存在は、最近発見されたといわれている。血管の位置が判明するとつぎは、口針を皮膚および血管に刺し込むのだが、吹けば飛ぶような蚊にとって、獲物の皮膚は固く血管は深いので、針を刺し込むことは至難の業である。これは人間がコンクリ−トの壁に鉄パイプを押し込むに等しい。この難問を解決するため、さぞかし苦労して編み出したと考えられる方法が、二重パイプ構造の口吻である。この口吻とは、上唇が外側のパイプを形成し、その中に下唇の舌状体が針のように伸びて、内側のパイプを作り上げている。そして重要な点は、この口吻は「チキン」というしなやかな物質で出来ており、外側のパイプの側面はギザギザになっていることである。蚊はまず思いっきり足を踏ん張り、口針を刺し込む反動ではじき返されないように、体を皮膚上にしっかりと固定する。準備ができたところで外側の上唇、つまり側面がギザギザのパイプを上下に振動させながら、獲物の皮膚や筋肉の細胞を押しのけるようにして刺していく。側面のギザギザは接触面積を小さくし、摩擦を少なくする効果があるので痛みを感じさせない。このようにして、何とも“蚊細い”口針を皮膚に打ち込むことに成功している。一難去って次の問題は、外唇が血管に達したところでストップしなければならないことである。いうまでもなく口針の先端が血管に達しなくても、通り過ぎてしまっても意味がない。細い血管の中に口針を正確に止めなければならない。そこで登場するのが、血液中に豊富に存在しているATPやADPを検知するセンサ−である。ここで、ATPとは アデノシン三燐酸の略で、生体内のエネルギ−源また、 ADPとは アデノシンニ燐酸の略で、ATPがエネルギ−を吐き出した後の生成物つまり、ギザギザ口吻の先端にあるセンサ−で、ATPやADPを検知することによって、血管内到達のシグナルを得ている。このことが確認されると内側の下唇が改めて血管内に挿入されて、血液を吸い上げるという寸法である。 ところが血液を吸い上げるという行為は、また蚊にとって実は大変な作業なのである。われわれがマクロに見る限り、コップの液体はそれを傾ければ容易に流れ出る。しかし、コップの径が限りなく小さくなると液体は流れ出なくなるばかりでなく、逆さまにしても落ちないであろう。直径が10ミクロンという蚊の内側口針(日本人男子20歳の頭髪は約20ミクロン)で、血液を吸い上げるには大変なエネルギ−を必要とする。これは、ミクロな環境にある液体の粘性や表面張力が驚くほど増大するからである。例えば、大きさが10分の1になると、粘性や摩擦によるエネルギ−消費は100倍にもなる。 しかも、極めて細いパイプの中で水より遥かに大きい粘性を持つ血液が、固まってしまっては元も子もない。そこで蚊は溶血剤を含む唾液を注入しながら吸血することになる。実はこの溶血剤なるものによりヒスタミンが注入され、局所的なアレルギ−症状を起こして痒くなるばかりではなく、時にはマラリヤや日本脳炎などの忌まわしい病原体もまた注入されることもある。 このようにして蚊は何とも巧妙な吸血行為を行うが、一方ではわが身も守らなくてはならない。蚊の体毛には圧力の微妙な変化をキャッチする鋭敏な圧力センサ−を備えている。吸血しながらも気流の変化を検知する努力を怠っていない。身の危険を察知するや素早く口針を抜く事が出来るし、あまり吸血し過ぎて飛翔不能になることを避けるためのコントロ−ルも心得ているようである。 あの小さな蚊が分かっているだけでも、これだけのことをいとも簡単にやってのけている。種を残すためとは言え、環境に順応し過酷な困難を克服して目的を達成するという、生命力の逞しさには驚嘆するばかりである。
(3) サルモネラ菌のべん毛の働き
サルモネラ菌は、食中毒の病原体としてしばしば新聞などにも登場する。腸チフス菌やパラチフス菌などもこの仲間である。これらの菌に対しては、抗生物質の特効薬が開発されて、以前ほど恐れられていない。ところで、サルモネラ菌の大きさは2ミクロンほどであるが、長さ7ミクロンほどのべん毛を7〜8本持っていて、それぞれをモ−タ−のように高速回転させて、推進力を得ている事が分かった。生体の中で回転部が発見されたことはこれが初めてであり、極めて画期的な事実であった。このことは生物学者ばかりでなく物理学者や工学関係者達をも驚かせた。べん毛は菌体から見て右まわりに回転され、それを船のスクリュ−のようにして泳いでいた。しかもその回転数は一分間に12000回転もあって、かつ瞬時に逆回転することも可能である。この構造たるや決して半端なものではない。これほどの高速回転を実現する環境では、水の見かけ上の粘性は1000倍以上になっていると考えられるから、サルモネラ菌は水のなかでも非常に粘性の高い液体の中を動いていることになる。これは単位重量に対して表面積が著しく増大するということに起因している。さらに驚いたことには、このモ−タ−も我々の周りに普通に存在するモ−タ−と同じく電気の力で動いていた。ただし、一般のモ−タ−はマイナスの電気の流れによって動かされているが、この場合はプラスの電気の流れによって動かされていた。しかも、その回転力の制御は筋肉の収縮と弛緩という比較的に簡単なオン・オフ制御で実現していた。このことをうまく利用すれば、かなり複雑な運動も出来るようになる。このようなサルモネラ菌に見られる鞭毛のモ−タ−の仕組みやその制御方法は、超微小な分子モ−タ−をも作ることが出来ることを示唆するものである。ここに述べた事はほんの一部に過ぎないが、これらがひとつひとつ実現すれば、その利用分野は可及的に増大する。昆虫学者ジ−ン・アダムス(米)は、著書のなかで次のように述べている。「昆虫の奇怪すぎる生態は、強烈な想像力を必要とする作家の脳裏にも、到底思い浮かばないようなことをさりげなく遣って退ける。作家は、自分の周りで起きている自然のドラマを観察しさえすればよい。自然は誰にでも開かれた図書館であり、それより魅力的な大冊はほとんど見当たらない」と。以上のように、作家だけではなく工学分野もまた虫の生態には学ぶところが多い。これらの仕組みを“マイクロマシン”の設計に役立てようとする動きは、21世紀を制する技術の一つとして各界から注目され、医療界および産業界にとってきわめて大きな夢の世界へのロマンを展開させてくれている。
3 “マイクロマシン”とはどんなものか
一般に、大きさが数ミリから数ミクロン、あるいはそれ以下といったミクロの機械を総称して、“マイクロマシン”と呼んでいる。 これまで虫のめぼしい行動や、特に蚊の吸血システムおよびサルモネラ菌の回転モ−タ−の話をしてきた。これらのすべてが参考になるわけではないが、先にも触れたように虫の体は外骨格で、その中の筋肉が収縮して外骨格を動かす構造になっているばかりではなく、特に柔らかい膜の部分が曲がる仕組みになっているので摩擦を生じない。このことは摩擦の影響を大きく受ける微小機械を動かすには最適な構造である。また、回転力の制御はオン・オフ制御で、筋肉の収縮と弛緩という簡単な構造であることも微小機械には有効である。これらを含む虫の生き方は、ここにいう“マイクロマシン”に関して、アイデアの宝庫であるとともに、得難い“師”ともなっている。 従来の機械では、センチメ−トルオーダ−のものが最小であったが、これからは数ミリから数ミクロンのものを作ろうというのである。さらには数ミクロンから数ナノメ−トルといった超微小のマシンが考えられている。ちなみに、1ナノメ−トルは、10億分の1メ−トル(100万分の1ミリ)のことである。 換言すれば、人工的に蚊のような機械やサルモネラ菌の回転モ−タ−のような機械などを創ろうというのが、“マイクロマシン”の夢である。このような超微小なマシンで、分子やさらに原子をも取り扱うことを可能にしょうという動きが出てきている。既にIBM社では、原子ひとつひとつを配列して「IBM」の文字を書くことに成功している(図1)。別紙に長さの単位を示す(表1)。
4 “マイクロマシン”はどこまできているかこれまで進められてきた“マイクロマシン”を大別すると、医療用および産業用のものがある。産業用では原子力発電所や可動するジェット・エンジンの亀裂や腐食を、“マイクロマシン”を用いて未然に発見しようとする動きなどがあるが、ここでは医療用のものを中心に概観することにしよう。
(1)蚊に学ぶ痛くない注射針の開発
蚊に刺されても痛くないのに、どうして注射は痛いの? そんな素朴な疑問に応えるため、関西大学工学部とベンチャ−企業「ライトニックス」は、蚊の仕組みを真似た痛くない「医学用マイクロ注射針」を、産学共同で開発した(毎日新聞H15.8.13)。 前述のように、蚊の針は細いだけでなく、「キチン」というしなやかな物質で出来ており、ギザギザな外側の針を振動させながら細胞を押しのけるように刺していく。このことを参考にしたことが無痛につながった。 開発された針は長さ1〜2ミリ、太さ85マイクロメ−トルで、手術用の糸などに使われるポリ乳酸を使用し、モ−タ−で振動を生じさせている。値段は通常の5倍の1本100円程度とか。 薬を閉じ込めた針を注射し、体内で分解された薬を患部に届けることができる。多量の薬の注入は出来ないが、脳神経血管系や心血管系疾患などで、患部に微量の薬を注入するピンポイント治療で威力を発揮しそうだという。
(2)胆嚢の摘出手術
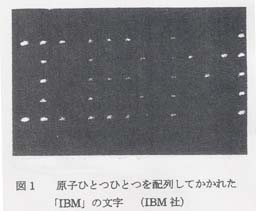
もうかれこれ10年前にもなろうかある日の読売新聞に、お腹の小さな傷跡を見せている男性の奇妙な写真が掲載されたことがある。この傷跡というのは、前年受けた胆嚢の摘出手術のときのものだそうで、お腹のシミと見誤るほどの小さなものであった。これまでの胆嚢の摘出手術では、一般に大きく開腹する必要があったので傷跡も目立ち、入院も最低で2〜3週間はかかった。ところがこの場合、小さな傷跡が4個あるだけで、三日目には退院できたという。この手術法は、まず直径6ミリの針を刺し、一定の圧力に調整した炭酸ガスを腹腔内に送り込む。お腹が膨らんだところで三ケ所に針をさしカテ−テルをさし込む。その中の一本からモニタ−テレビに接続された内視鏡を入れる。あとの二本からはいずれも先端が1ミリ以下に作られた手術用道具を入れ、一本はレ−ザ−によって患部を切除し、血管の血止めなど事後処理をするとともに、他の一本は切除した胆嚢などを体外に排除する(図2)。この方法によると、複数の人が同時に手術部を観察できるので、補助者との連係プレ−がし易い。切開部が少ないので出血量が少なく、損傷が軽微で腹筋機能が正常に温存される。また、開腹に起因する腹腔内癒着が少ないなどさまざまな利点がある。 この方法は、1987年フランスで開発されたもので、「腹腔鏡下手術」または「分散穴あけ法」などと呼ばれている。
(3) 肺がんの切除
前項で述べた胆嚢の摘出手術は、既に肺がんの切除にも応用されている。1992年、国立ガンセンタ−は内視鏡の一種である肺腔鏡を用いて、開胸せずに肺がんを切除するという手術に国内で初めて成功している 従来の肺がんの開胸手術は、背中を少なくとも約50センチ切開し、第四・第五肋骨の一部を切り取る必要があるので、患者の負担が大きい。この新しい方法では胆嚢摘出の場合と同じ要領で、胸部の四ケ所を小さく切開し、そこへ胸腔鏡や特殊なメス兼縫合器などをさし込み、胸腔鏡に接続されたテレビ画面で胸内を観察しながら肺がんを切除する。
第一号患者は以前に肺がんの開胸手術したことのある男性だったそうで、再度の開胸手術は体力的に無理があるとの判断からこの方法が実施されたとか。この手術では、がんの部分を含めて約5センチ四方が切除されたが、手術時間は開胸手術の半分、出血量も少なく翌日から歩く事が出来たという。しかもこの方法では、術後の合併症も起こりにくいという。
最近では、この「腹腔鏡下手術法」は胆嚢や肺がんのほかに、虫垂炎や十二指腸潰瘍および早期の大腸がんなどにも応用されている。
(4) 血管内視鏡の開発
これまでの話では、腹部または胸部に穴をあけ必要な器具を体内に入れ、体外から遠隔操作するというものであった。防衛医大では1992年、これまで四ケ所にさし込んだ必要な器具をすべて一本の細いパイプ内にまとめ、かつ直接血管内を観察しながら必要な処置をするという、画期的な血管内視鏡を世界に先駆けて開発した(図3)。 これは、直径1.8ミリの一本のカテ−テルの中に、照明光用の光ファイバ−・内視鏡で捕らえた実像をテレビに送るための光ファイバ−・カテ−テルの先端部分を操作するための機構および直径0.8ミリの手術用レ−ザ−を通すパイプなどを詰めたもので、狭心症や心筋梗塞などの治療が出来るという。 これまでの主な治療法には、血管内の狭窄部を風圧で拡張する方法や切開して別の血管でつなぐバイパス法などがあるが、再発の可能性や手術の危険性などがあって万全の策とはいえなかった。 最近では、直径1.5ミリの内視鏡もできており、動脈硬化部だけに取り込まれる特殊な物質を用いて、レ−ザ−の照明で確認しながらその部分だけを選択的にレ−ザ−で蒸散させるという研究も進められている。このように、ここ10数年間の治療技術は患者の苦痛を低減する目的で、これまでの外科的な侵襲治療から低侵襲治療に様変わりしつつある。前述の腹腔鏡下手術や血管内視鏡による治療に代表されるように、新たな低侵襲治療システムが脚光を浴びている。このため、本質的なマイクロ化が求められており、体内に入る各種検査・処置用器具の小型化が精力的に進められている。
5 これからの“マイクロマシン”はどんな方向に進むだろうか先に、蚊は溶血剤を含む唾液を注入するとともに、時には忌まわしい病原体もまた注入されることを述べた。つまり、病原体は賢明にも蚊の唾液腺の中に潜んで、獲物の血管内に侵入する出番を待っているというわけだ。 このように血管内に入り込むという概念には、さらにもう一つのキッカケがあったと思われる。20世紀ホオックス映画に「ミクロの決死圏」という映画があった。題名を覚えておられる方も多いでしょう。 これは、非常に小さい潜水艦に人間が乗り込み、血管の中に入り込むという話であった。これはSFの世界の話であって、ある大きさのものをそのまま縮小することはとても出来る事ではないし、人間が小さくなるなどとは論外な話である。しかし、この映画の潜水艦を“マイクロマシン”で作ったマイクロロボットで置き換えれば、“マイクロマシン”の医学への夢は広がる
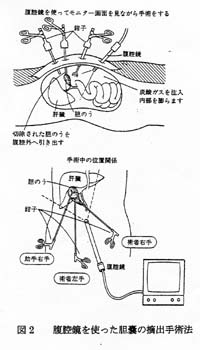
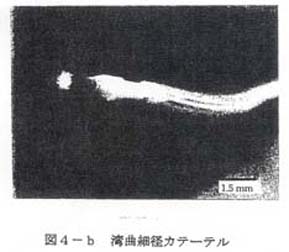
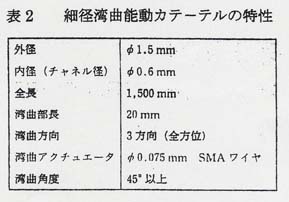
(1) 細い血管内に低侵襲で進入できる湾曲能動カテ−テル医学の夢を実現する手始めとして、まず湾曲能動カテ−テルの開発が進められている。これは、脳血管を想定して複雑な狭い空間に容易に進入しようとするもので、先端部が血管壁に接触すると自動的に反対方向に湾曲行動する事を狙いとしている(図4-a. 図4-b.表2)。これには、細くて長いカテ−テルに正確な湾曲機構を与えるとともに、微細な圧覚と触覚を検出するためのマイクロ圧覚センサ−およびマイクロ触覚センサ−を設定しなければならない。手術者がカテ−テルを血管に挿入する場合、カテ−テル先端部はさまざまな角度で血管組織と接触する。柔らかい生体組織を傷つけないために、接触圧を敏感に計測して自動的に湾曲回避する必要がある。これにはマイクロ圧覚センサ−が不可欠である。また、医療現場では、圧診・触診による診断が重要である。この種の診断は開口手術ではできるが、カテ−テルによる診断ではできない。このため、患部の機械的パラメ−タ、つまり患部の粘性率や弾性率などを正しく測定する触覚センサ−が必要である。これらは近い将来に開発され、実用化される可能性が高い。
(2) 血管内を自由に走行するマイクロロボットやがて、低侵襲な湾曲能動カテ−テルが完成し、脳血管などの極めて狭い空間の中へ入り込み、かつ自由に走行することが出来るマイクロロボットがお見えしたら、どういうことになるだろうか。このロボットを外部から遠隔操作するか、あるいはマイクロロボット自身に内蔵されたプログラムに従って、血管という通路を自由に走行させ、治療が必要な患部に達したら、これに必要かつ適切な仕事をさせるということができないだろうか。 例えば、脳血栓がある場合、ロボットは脳に入って行き血栓をかきとりそれを排除する。また、脳血管が破損した場合にも、破損箇所にたどり着き小さなホチキスでとめて、縫い合わせるなどが考えられる。 マイクロロボットの有効性はそればかりではない。特定の箇所に特定な薬を送り届けるという「ドラッグ・デリバリ・システム」にも最適である。これまで患者にはさまざまな薬が投与されているが、全身投与が前提だから必要以上に多量の薬を使う。がん治療の場合、発がん箇所だけに薬を運んでいってこれを絶滅することが理想的である。しかし現在それができていない。だから、体中を無理やり制がん剤漬けにしてしまう。このことが正常な細胞にも副作用を起こす原因になっていることは、何とも悲しいことである。 さらには、マイクロロボットにインシュリン・タンクとポンプを背負わせて、絶えず血糖値をチェックさせながら、必要なインシュリンを放出させるなど、さまざまな使い方が考えられている。
(3) 仮想現実感の導入
SFの世界でない限り人間は小さくなり得ない。ならば、人間が入り込もうとする対象物、例えば血管などを立体的に拡大すればよい。 ここで興味があることは、“マイクロマシン”とコンピュ−タ−の連携利用による「仮想現実感」(バ−チャル・リアリティ:VR)である。これは、コンピュ−タ−の中に作られた仮想の立体空間の中に人間が入り、現実とは異なる架空の世界のなかで、恰も現実と同じ視覚と触覚を得て状況を実感しながら、さまざまな仕事を適切に実施しようというものである(図5)。 例えば、ある部屋のモデルをそのままコンピュ−タ−で作り出し、それに必要な規則を与えておく。物を持つという信号を受け取ると、その触覚を手に伝える。眼前に広がる光景は立体像、これを立体像監視可能な眼鏡で見ると、恰もコンピュ−タ−の中が現実のように感じられることになる。このため眼には大きな眼鏡「ゴ−グル」を着け、手にはセンサ−を持つ特殊な手袋「グロ−ブ」を着けねばならない。これらの「ゴ−グル」や「グロ−ブ」はコンピュ−タ−で制御されているので、「ゴ−グル」には設定された部屋が見え、「グロ−ブ」で触れば感触が伝わってくるというわけだ。 もともとこの考え方はNASAで開発されたものである。宇宙船内で乗組員や装置に何等かの障害が発生するとか、宇宙船外での不都合なことが生じた場合に備えて検討されてきたもので、既にNASAではかなりの実績を持っている。 さきに述べたマイクロロボットは非常に狭い空間内を動き、扱う対象もまた微小なものにならざるをえない。このようなミクロな環境で適切な医療処置を施すことは至難なわざである。そこでこのバ−チャル・リアリティを医療用に導入することが考えられている。 さて、このバーチャル・リアリティとマイクロロボットを連携させると、医療の立場からはどのようなことが出来るだろうか。 例えば、脳の血管に見られるひびを補正しようとする場合、バ−チャル・リアリティの映像を「ゴ−グル」で見ている医師は、架空の世界の中で小さな血管も直径が身長以上の巨大な管として見えるから、眼前の拡大されたひびを巨視的な状態で、大きなホチキスを用いて正確に補正することが出来る。この動作のすべてが信号として血管内のマイクロロボットに伝達されるので、マイクロロボットは医師の動作の通り、実際には微小なひびを数ミクロンほどのホチキスで適切に補正するということになる。
極端な話ではあるが近い将来には、血管内に潜む大きさ2〜3ミクロンの病原体を特定し、その一匹一匹を殺していくという芸当すらできることになろう。 これまで主に医療用の話をしてきたが、同様な事は産業用としても利用できよう。例えば、原子力発電所などのプラントやジェット・エンジンのパイプの中に、マイクロロボットを絶えず巡回させて、微小なクラックやピンホ−ルなどの予防を含む早期発見の段階で、いち早く修理するということもできよう。 このようにバ−チャル・リアリティの技術とマイクロロボットを連携して利用することにより、専門家は拡大された三次元の映像の中で現実感を持ちながら、患部や故障箇所への徹底した措置ができることになろう。 このバーチャル・リアリティの利用はマイクロロボットだけではなく、さまざまなところで積極的に利用する動きが出てきている。例えば、不動産業界である。これまで不動産情報では、平面的な間取り図しか流されていない。それでは物件の実感はえられない。お客さんが例の「ゴ−グル」を着けると、架空の中で家屋の立地環境を観察しながら到着するとドア−が開き、それからはあたかも家の中を歩き回っているかのように、内部のひとつひとつをチェックすることができる。お客さんは現物を見なくとも、適切な判断ができるでしょう。 話は変わるが、中国に古い話がある。 「一人の農夫がいて朝早くからよく働く。昼休みに大木の木陰で昼寝して夢を見た。それは凶暴な人食い虎になった夢だ。人間を襲い食べている。特に女・子供が好物だ。満腹となり眠くなった虎は、昼寝して農夫になった夢を見る。実直に働く農夫はやがて眠くなり昼寝して、また虎になった夢を見る」。 この話はエンドレスだ。農夫は呆然として呟く。「わしは、本当は農夫なんだろうか。それとも虎なんだろうか」。バーチャル・リアリティは、こんな世界を作り出す可能性を秘めている。
(4) 学者の夢とナノテクノロジ− 1959年、米国の有名な理論物理学者R・ファインマンは、奇妙な提案をした。「一般の機械でさらに小さい機械を作り、その機械でまたより小さな機械を作るというプロセスを繰り返していくと、ついには分子レベルの機械を作ることができる筈だ」。 この提案は、学者の狂気の夢として当時あまりかえりみられなかった。しかし、この提案の機械という言葉をロボットに置き換えると、「一般のロボットでさらに小さいロボットを作り、そのロボットでまたより小さなロボットを作るというプロセスを繰り返していくと、ついには分子レベルのロボットを作ることができる筈だ」ということになる。これは今日のマイクロマシン時代を予見したものと言える。 MITのE・ドレックスラーは1986年、著書「創造する機械」のなかで“分子機械”という概念を説明し、次のように述べている。「タンパク質などの生体分子には、構造支持体・運動部分・ベアリング・駆動装置などに相当するものがある。これらの分子部品を組み立てることにより、分子スケ−ルの機械が作れる可能性がある」と。このような考え方のなかで、この機械自体もナノメ−タ−のオ−ダ−であるところから、“ナノテクノロジ−”という言葉がでてきた。さらにドレックスラ−は、この分子機械を生産する機械として、“万能分子組み立て機”なるものを提案した。このような“万能分子組み立て機”がひとたび出来れば、あとはそれを利用してさまざまなものを作るということになるが、肝心の最初の一台をどうして作るのか。これはかなり難しい問題である。ドレックスラ−は最初の一台の作り方については述べていない。あくまでアイデアを提案しているに過ぎない。だが、ドレックスラ−は強く主張する。「100年以内に“万能分子組み立て機”が実用され、あらゆる物質の分子構造を自由に組み換えたり、どのような分子構造の物質をも自由自在に創造できる時代が必ずやってくる」。ホントかしら?これは蛇足になるが、“マクスウェルの悪魔”という有名な話がある。英国の物理学者J・マクスウェルは1860年代に、「温度が均一な状態からでもエネルギ−を取り出すことが出来る」と言い出した。例えば、気体の温度が均一というのは、気体分子がすべて均一の速度で走り回っている状態である。ところがここでの均一というのは、すべての気体分子の速度が平均化されたもので、実際には衝突などで平均速度より速くなったり遅くなったりしている。これは“熱の揺らぎ”と言われている。そこで、マクスウェルはいう。「温度の均一な場を二つの部屋に仕切り、この仕切りに小さいドアを作ってそこに番人を置く。速い気体分子が来たときドアを開けて一方に入れ遅いものは入れない。この操作を繰り返せばやがて仕切りを境にして、速い気体分子の多い高温の部屋と遅い気体分子の多い低温の部屋が生じ、その温度差分のエネルギ−を取り出すことが出来る」。一般にある状態内で高温部と低温部の温度差があれば、温度差に相当するエネルギ−を取り出すことが出来るが、マクスウェルのいう「温度が均一な状態からでもエネルギ−が取り出せる」というのは熱力学の第二法則に反する。しかし、当時誰にもこの言い分を覆す事は出来なかった。ところが、東大の藤正教授の最近の計測によると、生体筋肉の最小単位(サルコメア)は消費するATPより遥かに大きな仕事をすることがわかった。このことから、「ATPは場の非対称性を作るきっかけの役目をしているだけで、実際はノイズとして存在する“熱の揺らぎ”を利用しているのではないか」という見方が出てきている。しかし、どう利用しているかは解明されていない。この辺のメカニズムが解明され、ナノオ−ダ−の超微小エネルギ−素子が姿を見せれば、これらを数億個も集積することにより、任意のエネルギ−源を作ることができる。そうなればエネルギ−の世界も、コンピュ−タ−の世界の分散処理と同じように、個々のチップベ−スまで徹底した“分散エネルギ−源”時代が到来する可能性があると考えられている。これもまたごく最近の話であるが、愛知教育大学と成蹊大学の研究グル−プは、炭素がサッカ−ボ−ル型に結合した分子C60が、直径100万分の1ミリほどのベアリングになることを実験で示した(朝日新聞夕刊:H15.8.18)。これは“ナノテクノロジ−”の“マイクロマシン”をつくるときの部品になりそうだという。実験では、炭素原子が繋がっているグラファイトの薄膜2枚の間に、複数個の分子C60をきれいに並べ、グラファイト薄膜をずらそうとしたところ、極めて滑らかに動いたという(概念図6)。これは、グラファイトの炭素が作る六角形とサッカ−ボ−ルのようなC60の六角形とが歯車のようにかみ合い、C60が転がってベアリングの役目を果たしたことが分かった。研究グル−プはさらに、「グラファイトで超微細世界の道路と車体を作り車輪にC60を使えば、“ナノトラック”ともいえる運搬システムが出来るのではないか」と抱負を述べている。終わりに参考のため、電磁波の波長になぞらえた長さの領域を示す(図7)。
6 むすび
虫のしたたかな生き方から夢のテクノロジ−に至るまで、医療用の“マイクロマシン”を中心に、その現状と予想される方向の概要について述べた。“マイクロマシン”は機械と電気の微小な融合体であり、その作り方には技術上の多くの制約がある。ミクロの世界ではすでにみてきたように、粘性とか摩擦とかさらには制御など、マクロの環境では考えられないような諸問題が大きくクロ−ズアップされてくる。これらについて虫の行動やSFの世界を参考に、弛まぬ努力が推進されているわけであるが、単なる比例関係が成り立つような生易しく単純なものではない。“マイクロマシン”に必要な微小かつ精密な素子を創り出すこともさることながら、これらの制御にはこれまでの複雑な方法が、電気的にも機械的にも適用できないという事情がある。これには虫の外骨格が実行しているような単純なオン・オフ制御で、複雑かつ高精度な制御方法を実現しなければならない。現在この方法がこれからの主流になるだろうと考えられているが、若しそれらのひとつひとつはできても、それらを“マイクロマシン”の集合体としてどのように制御するかの問題や、さらにはこれらに高度な知能を持たせ、自ら判断できるような自律性をどのように与えるかなど難題が山積している。このように“マイクロマシン”の開発は、全人未踏な世界に踏み込まねばならないものだけに、新たな解決を迫られる問題が多い。しかし、それらは何れも絶対に不可能というものではない。いま、やっと芽をだしたばかりの“マイクロマシン”ではあるが、その将来には医療用にしても産業用にしても、現在想像もつかないような広大な応用分野が確実に待っているものと思われる。